.jpg)
.jpg)
.jpg)
.jpg)
Nema 34 (86 mm) hybride stappenmotor, bipolair, 4-draads, ACME-spindel, geluidsarm, lange levensduur, Formical Equipment
Beschrijving
Deze hybride stappenmotor van 86 mm is verkrijgbaar in drie uitvoeringen: extern aangedreven, doorlopende as en doorlopende vaste as. U kunt de uitvoering kiezen die het beste aansluit op uw specifieke behoeften.
De ACME-stappenmotor met spindel zet roterende beweging om in lineaire beweging met behulp van een spindel. De spindel is verkrijgbaar in verschillende combinaties van diameter en spoed om aan uiteenlopende toepassingsvereisten te voldoen.
De spindelstappenmotor wordt doorgaans gebruikt in toepassingen die nauwkeurige lineaire beweging, een laag geluidsniveau en een hoge kosteneffectiviteit vereisen, zoals medische apparatuur, telecommunicatieapparatuur, enz.
ThinkerMotion biedt een compleet assortiment spindel-stappenmotoren (NEMA 8, NEMA11, NEMA14, NEMA17, NEMA23, NEMA24, NEMA34) met een belastingsbereik van 30N tot 2400N. Er zijn 3 typen beschikbaar (extern, vast en niet vast). Aanpassingen zoals spindellengte en -uiteinde, magnetische rem, encoder, anti-spelingmoer, enz. zijn op aanvraag mogelijk. De spindel kan op verzoek ook met Teflon worden gecoat.

Beschrijvingen
| Productnaam | 86 mm hybride stappenmotoren |
| Model | VSM86HSM |
| Type | hybride stappenmotoren |
| Staphoek | 1,8° |
| Spanning (V) | 3/4.8 |
| Stroomsterkte (A) | 6 |
| Weerstand (Ohm) | 0,5/0,8 |
| Inductantie (mH) | 4/8.5 |
| Aansluitdraden | 4 |
| Motorlengte (mm) | 76/114 |
| Omgevingstemperatuur | -20℃ ~ +50℃ |
| Temperatuurstijging | Maximaal 80.000. |
| Diëlektrische sterkte | Maximaal 1 mA bij 500 V, 1 kHz, 1 sec. |
| Isolatieweerstand | 100MΩ min. @500Vdc |
Certificeringen

Elektrische parameters:
| Motorgrootte | Spanning /Fase (V) | Huidig /Fase (A) | Weerstand /Fase (Ω) | Inductie /Fase (mH) | Aantal Aansluitdraden | Rotortraagheid (g.cm2) | Motorgewicht (G) | Motorlengte L (mm) |
| 86 | 3 | 6 | 0,5 | 4 | 4 | 1300 | 2400 | 76 |
| 86 | 4.8 | 6 | 0,8 | 8.5 | 4 | 2500 | 5000 | 114 |
Specificaties en prestatieparameters van de spindel
| Diameter (mm) | Leiding (mm) | Stap (mm) | Schakel de zelfvergrendelende kracht uit (N) |
| 15.875 | 2.54 | 0,0127 | 2000 |
| 15.875 | 3.175 | 0,015875 | 1500 |
| 15.875 | 6.35 | 0,03175 | 200 |
| 15.875 | 12.7 | 0,0635 | 50 |
| 15.875 | 25.4 | 0,127 | 20 |
Let op: Neem contact met ons op voor meer specificaties over de spindel.
VSM86HSM standaard externe motor schematische tekening
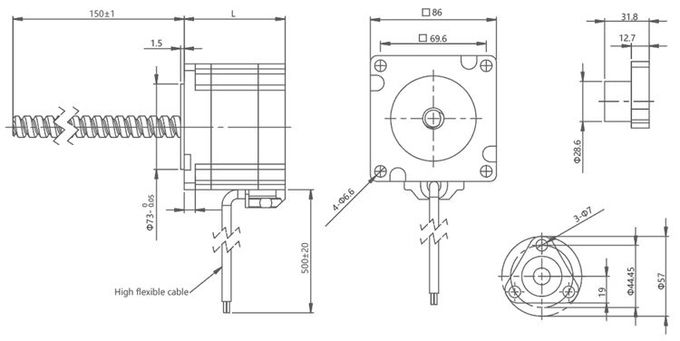
Opmerkingen:
De lengte van de spindel kan worden aangepast.
Aan het uiteinde van de spindel is maatwerkbewerking mogelijk.
86 mm hybride stappenmotoren, standaard inbouwmotor schematische tekening:
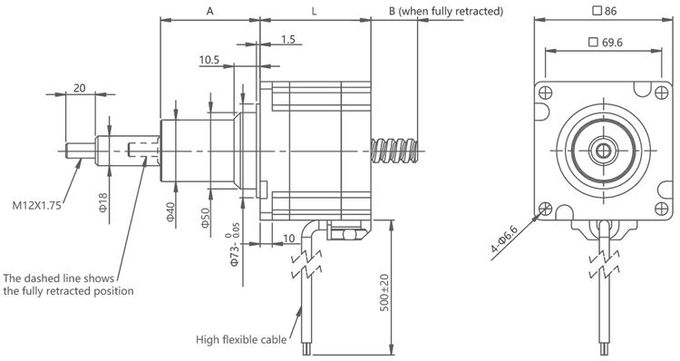
Opmerkingen:
Aan het uiteinde van de spindel is maatwerkbewerking mogelijk.
| Beroerte S (mm) | Dimensie A (mm) | Afmeting B (mm) | |
| L = 76 | L = 114 | ||
| 12.7 | 29.7 | 0 | 0 |
| 19.1 | 36.1 | 2.1 | 0 |
| 25.4 | 42.4 | 8.4 | 0 |
| 31.8 | 48.8 | 14.8 | 0 |
| 38.1 | 55.1 | 21.1 | 0 |
| 50.8 | 67.8 | 33.8 | 0 |
| 63,5 | 80,5 | 46.5 | 8.5 |
86 mm hybride stappenmotor, standaard doorvoermontage, schematische tekening.
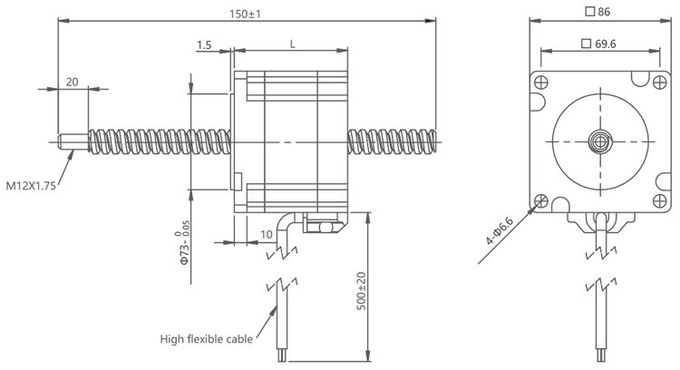
Opmerkingen:
De lengte van de spindel kan worden aangepast.
Aan het uiteinde van de spindel is maatwerkbewerking mogelijk.
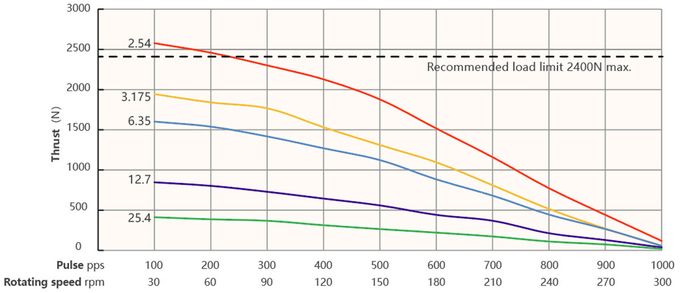
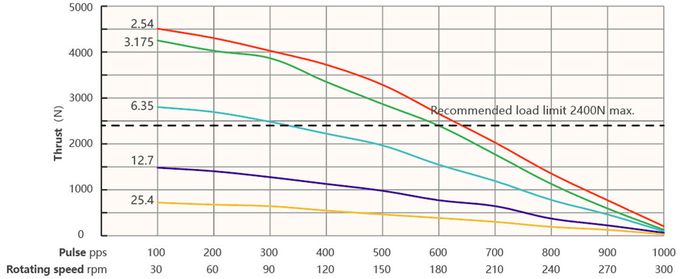
Snelheids- en stuwkrachtcurve:
86-serie 76 mm motorlengte bipolaire chopper aandrijving
100% stroompulsfrequentie en stuwkrachtcurve (spindel met een diameter van 15,88 mm)
86-serie 114 mm motorlengte bipolaire chopper aandrijving
100% stroompulsfrequentie en stuwkrachtcurve (spindel met een diameter van 15,88 mm)
| Lood (mm) | Lineaire snelheid (mm/s) | |||||||||
| 2.54 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 | 12.7 |
| 3.175 | 1.5875 | 3.175 | 4.7625 | 6.35 | 7.9375 | 9.525 | 11.1125 | 12.7 | 14.2875 | 15.875 |
| 6.35 | 3.175 | 6.35 | 9.525 | 12.7 | 15.875 | 19.05 | 22.225 | 25.4 | 28.575 | 31,75 |
| 12.7 | 6.35 | 12.7 | 19.05 | 25.4 | 31,75 | 38.1 | 44.45 | 50.8 | 57.15 | 63,5 |
| 25.4 | 12.7 | 25.4 | 38.1 | 50.8 | 63,5 | 76.2 | 88.9 | 101.6 | 114.3 | 127 |
Testomstandigheden:
Chopper-aandrijving, geen hellingshoek, halve micro-stepping, aandrijfspanning 40V
Toepassingsgebieden
CNC-bewerkingsmachines:86 mm hybride stappenmotoren worden veel gebruikt in CNC-bewerkingsmachines voor het regelen van de beweging en positie van snijgereedschappen, om zo zeer nauwkeurige bewerkingen te realiseren.
Automatiseringsapparatuur:86 mm hybride stappenmotoren kunnen worden gebruikt in diverse automatiseringsapparatuur, zoals automatische verpakkingsmachines, automatische sorteersystemen, geautomatiseerde productielijnen, enz., voor het aansturen van beweging en positionering.
3D-printen:In de 3D-printtechnologie worden hybride stappenmotoren van 86 mm gebruikt om de positie en beweging van de printkop te regelen en zo nauwkeurige printbewerkingen te realiseren.
Medische hulpmiddelen:86 mm hybride stappenmotoren worden veel gebruikt in medische apparaten, zoals medische infuuspompen, medische robots, medische scanapparatuur, enz., voor nauwkeurige positie- en bewegingscontrole.
Telecommunicatieapparatuur:86 mm hybride stappenmotoren kunnen worden gebruikt voor nauwkeurige positionering en besturing in telecommunicatieapparatuur, zoals het positioneringssysteem van communicatieantennes en de precieze besturing van glasvezelapparatuur.
Textielmachines:In de textielindustrie kunnen hybride stappenmotoren van 86 mm worden gebruikt om spinmachines, weefgetouwen en andere apparatuur aan te sturen en zo de nauwkeurigheid en stabiliteit van het textielproces te waarborgen.
Robotica:86 mm hybride stappenmotoren kunnen worden gebruikt in diverse robottoepassingen, waaronder industriële robots, servicerobots, collaboratieve robots, enz., voor nauwkeurige beweging en bediening.
Geautomatiseerde magazijnsystemen:In geautomatiseerde magazijn- en logistieke systemen kunnen hybride stappenmotoren van 86 mm worden gebruikt om transportbanden, liften, stapelaars en andere apparatuur aan te sturen, waardoor nauwkeurige positionering en handling van artikelen mogelijk is.
Voordeel
Vloeiende en precieze beweging:86 mm hybride stappenmotoren kunnen dankzij hun inherente stapresolutie soepele en precieze bewegingen realiseren. Dit zorgt voor nauwkeurige positionering en vloeiende bewegingen, waardoor het risico op trillingen wordt verminderd en hoogwaardige prestaties worden gegarandeerd.
Hoog koppel bij lage snelheden:Hybride stappenmotoren leveren een hoog koppel, zelfs bij lage snelheden, waardoor ze geschikt zijn voor toepassingen die een sterk houd- of startkoppel vereisen. Deze eigenschap is met name voordelig in situaties waarin de motor zijn positie moet behouden tegen externe krachten.
Breed scala aan stapresoluties:86 mm hybride stappenmotoren bieden een breed scala aan stapresoluties, waardoor nauwkeurige bewegingscontrole mogelijk is. Door gebruik te maken van microstepping-technieken kan de motor elke stap onderverdelen in kleinere substappen, wat resulteert in vloeiendere bewegingen en een verbeterde positioneringsnauwkeurigheid.
Eenvoudig aan te sturen en te besturen: Hybride stappenmotoren hebben een eenvoudige aansturings- en besturingsarchitectuur, die doorgaans gebruikmaakt van puls- en richtingssignalen. Hierdoor zijn ze gemakkelijk te integreren in diverse besturingssystemen, wat de complexiteit en ontwikkeltijd reduceert.
Hoge betrouwbaarheid en duurzaamheid:86 mm hybride stappenmotoren staan bekend om hun robuustheid en lange levensduur. Ze zijn bestand tegen ve veeleisende bedrijfsomstandigheden, zoals temperatuurschommelingen en mechanische spanningen, zonder dat dit ten koste gaat van de prestaties.
Kosteneffectieve oplossing:Hybride stappenmotoren bieden een kosteneffectieve oplossing in vergelijking met andere bewegingsbesturingstechnologieën, zoals servomotoren. Ze bieden een goede balans tussen prestaties en kosten, waardoor ze geschikt zijn voor toepassingen waar budgetoverwegingen belangrijk zijn.
Veelzijdige toepassingen:86 mm hybride stappenmotoren vinden toepassingen in diverse industrieën, waaronder robotica, automatisering, productie, 3D-printing, medische apparatuur en meer. Dankzij hun veelzijdigheid kunnen ze worden gebruikt in een breed scala aan toepassingen die nauwkeurige positionering en besturing vereisen.
Vereisten voor motorselectie:
►Bewegings-/montagerichting
►Belastingsvereisten
►Vereisten voor beroertes
►Eindbewerkingseisen
►Nauwkeurigheidseisen
►Vereisten voor feedback van de encoder
►Vereisten voor handmatige aanpassing
►Milieuvereisten
Productiewerkplaats


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)